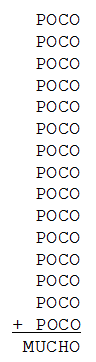
This pleasing cryptarithm, by Bob High, appears in the September/October 2014 issue of MIT Technology Review. If each letter stands for a digit, what arithmetic sum is enciphered here?
|
SelectClick for Answer |
POCO is 4595 and MUCHO is 68925.
There are 15 POCOs, so the sum of each column is a multiple of 15, and hence (without the carry from the column to its right) ends in a 5 or a 0. The rightmost column has no carry, so the O in MUCHO stands for 0 or 5. Which is it?
- If it’s 0, that means that the sum of all the Os in the rightmost column is 0, and that there’s no carry into the tens column. If there’s no carry, we need to find a digit for C that when multiplied by 15 produces a two-digit answer (the CH in MUCHO) that starts with that digit (since the hundreds column in the sum is otherwise zero). The only digit that will do that is 1 (1 × 15 = 15). But if CH is 15 then there’s no carry into the thousands column, which means that U must be 0 or 5 (15 × P). And we’ve already assigned 0 to O and 5 to H. So this can’t be right.
- If it’s 5, then the carry into the tens column is 7 (15 × 5 = 75). What is C? Every possibility from 0 to 8 produces conflicts or requires C to have two different values, but C = 9 produces a sum in the tens column of 142 (15 × 9 plus the 7 carry). In that case H = 2 and 14 is carried into the hundreds column. We know that O is 5, so that column now totals 89 (5 × 15 + 14). C is 9 and 8 is carried into the thousands column, where it’s added to 15 Ps. Here every possibility except P = 4 creates duplications or conflicts, so U is 8 and M is 6.
“Because O must equal 5 and C must equal 9 and P must equal 4, I believe the solution is unique,” writes NYU computer scientist Allan Gottlieb, who conducts the puzzle column. “I like these alphabetical number problems; but, cannot recall seeing this one before.”
|